«Кибернетика, или управление и связь в животном и машине»
Н. Винер
| ↑ | Оглавление | ||
| ← | Глава 10: «Мозговые волны и самоорганизующиеся системы» | Приложение 2: Винер Н. «Машина умнее своего создателя» | → |
Поведение, целенаправленность и телеология1
Артуро Розенблют, Норберт Винер и Джулиан Бигелоу
Настоящий этюд преследует двоякую цель. Во-первых, определить бихевиористический (поведенческий)2 метод исследования естественных событий и классифицировать поведение. Во-вторых, подчеркнуть важность понятия целенаправленности.
Пусть дан некоторый объект, относительно отделенный от окружающей среды для своего изучения. Бихевиористический метод состоит в рассмотрении выхода объекта и отношений между выходом и входом. Под выходом понимается любое изменение, производимое объектом в окружении. Обратно, под входом понимается любое внешнее к объекту событие, изменяющее любым образом этот объект.
Предыдущая формулировка не содержит никакого упоминания о специфической структуре и внутренней организации объекта. Это принципиальное умолчание, ибо на нем основано различие между бихевиористическим и альтернативным функциональным методом. При функциональном анализе, в противоположность бихевиористическому подходу, главную цель составляет внутренняя организация изучаемого образования, его структура и свойства; отношения между объектом и окружением значат сравнительно мало.
Из такого определения бихевиористического метода вытекает весьма широкое определение поведения. Под поведением понимается любое изменение объекта но отношению к окружающей среде. Это изменение может представлять собой преимущественно выход объекта при минимальном, дальнем или побочном входе; или же оно может быть непосредственно приписано определенному входу. В итоге любое преобразование объекта, заметное извне, может быть отмечено как поведение. Термин был бы поэтому слишком общим, чтобы приносить пользу, если бы не возможность ограничения его соответствующими прилагательными, другими словами, возможность классификации поведения.
Изменения энергии, сопутствующие поведению, дают основание для классификации. Активным поведением является такое, при котором объект служит источником выходной энергии, используемой в данной специфической реакции. Объект может аккумулировать энергию, приносимую дальним или относительно близким входом, но вход непосредственно не возбуждает выхода. При пассивном поведении, напротив, объект не составляет источника энергии; вся энергия в выходе должна быть приписана непосредственно входу (пример – бросание предмета), или же объект способен управлять энергией, остающейся внешней к нему в течение всей реакции (парящий полет птицы).
Активное поведение можно подразделить на два класса: нецеленаправленное (или случайное) и целенаправленное. Термин «целенаправленное» здесь означает, что действие или поведение допускает истолкование как направленное на достижение некоторой цели, т.е. некоторого конечного состояния, при котором объект вступает в определенную связь в пространстве или во времени с некоторым другим объектом или событием. Нецеленаправленным поведением является такое, которое нельзя истолковать подобным образом.
Слова «допускает истолкование», употребленные выше, могут показаться настолько туманными, что все различие теряет смысл. Однако признание, что поведение иногда бывает целенаправленным, – дело неизбежное и полезное, как можно видеть из следующего. В основе понятия целенаправленности лежит представление о нашей «произвольной деятельности». Но целенаправленность произвольных действий – это не вопрос субъективной интерпретации, а физиологический факт. Совершая произвольное действие, мы произвольно выбираем специфическую цель, а не специфическое движение. Так, решив взять стакан с водой и поднести его ко рту, мы не приказываем определенным мышцам сократиться в определенной степени и в определенной последовательности – мы просто задаемся целью, и реакция следует автоматически. Экспериментальная физиология была до сих пор по существу неспособна объяснить механизм произвольной деятельности. Мы осмеливаемся связать эту неудачу с тем обстоятельством, что экспериментатор, раздражающий двигательные области коры головного мозга, отнюдь не воспроизводит произвольной реакции; он задаст эффективные, «выходные» пути, по не задает цели, как при произвольном движении.
Часто выражался взгляд, что все машины целенаправленны. Это несостоятельный взгляд. Во-первых, можно сослаться на механические устройства типа рулетки для азартной игры, специально созданные для нецеленаправлепности. Далее, существуют устройства типа часов, созданные, правда, с определенной целью, но обладающие нецеленаправленным, хотя и регулярным, поведением; в самом деле, нет никакого специфического конечного состояния, к которому стремилось бы движение часов. Подобно этому, хотя ружье можно использовать для вполне определенной цели, целенаправленность не присуща внутренне его действию; возможна случайная пальба, нарочито бесцельная.
Некоторые машины, с другой стороны, внутренне целенаправленны. Возьмем, например, торпеду, снабженную механизмом поиска цели. Для обозначения машин с внутренне целенаправленным поведением был специально выкован термин «сервомеханизм».
Эти соображения показывают, что хотя определение целенаправленного поведения остается относительно смутным и лишенным точного операционального значения3, самое понятие целенаправленности полезно и заслуживает сохранения.
Целенаправленное активное поведение можно подразделить на два класса: «с обратной связью» (или «телеологическое») и «без обратной связи» (или «нетелеологическое»). Выражение «обратная связь» употребляется инженерами в двух различных смыслах. В широком смысле оно означает, что часть выходной энергии аппарата или машины возвращается как вход; примером может служить электрический усилитель с обратной связью. Обратная связь в этих случаях положительна: часть выхода, снова поступающая в объект, имеет тот же знак, что и первоначальный входной сигнал. Положительная обратная связь прибавляется к входным сигналам, она не корректирует их. Термин «обратная связь» применяется также в более узком смысле для обозначения того, что поведение объекта управляется величиной ошибки в положении объекта по отношению к некоторой специфической дели. В этом случае обратная связь отрицательна, т.е. сигналы от цели используются для ограничения выходов, которые в противном случае шли бы дальше цели. Это второе значение термина «обратная связь» и имеется здесь в виду.
Можно считать, что всякое целенаправленное действие требует отрицательной обратной связи. Если цель должна быть достигнута, то в какой-то момент необходимы сигналы от нее, чтобы направить поведение. Под поведением без обратной связи понимается такое, при котором сигналы от цели не изменяют деятельности объекта в процессе поведения. Так, можно послать машину сразить светящийся объект, хотя машина может быть нечувствительна к свету. Подобно этому змея может броситься на лягушку или лягушка – на муху, не получая зрительных или иных впечатлений от жертвы после начала движения. Действительно, движение в этих случаях происходит настолько быстро, что нервные импульсы едва ли имеют время сформироваться в сетчатке глаза, дойти до центральной нервной системы и возбудить новые импульсы, которые бы своевременно достигли мышц для эффективной перемены поведения.
В противоположность рассмотренным примерам поведение некоторых машин и некоторые реакции живых организмов включают в себя непрерывную обратную связь от цели, изменяющую и направляющую действующий объект. Этот тип поведения эффективнее, чем предыдущий, особенно когда цель нестационарна. Но управление с непрерывной обратной связью способно привести к весьма неуклюжему поведению, если обратная связь плохо демпфирована и для некоторых частот колебаний вместо отрицательной становится положительной. Предположим, например, что построена машина для поражения движущейся светящейся цели; траектория, описываемая машиной, регулируется направлением и силой света от цели. Предположим, что следуя движению цели в определенном направлении, машина далеко проскочит за цель и что будет приложено чрезмерно большое усилие, чтобы развернуть машину в противоположном направлении. Если это движение вновь промахнется, начнется серия все более сильных колебаний, и машина упустит цель.
Эта картина последствий недемпфированной обратной связи удивительно напоминает то, что наблюдается при выполнении произвольного действия больным, у которого поврежден мозжечок. В состоянии покоя субъект не обнаруживает заметного двигательного расстройства. Если, однако, попросить его поднести ко рту стакан с водой, то рука, несущая стакан, будет совершать, по мере приближения к цели, серию колебательных движений возрастающей амплитуды; в результате вода расплещется, и намерение не будет осуществлено. Этот симптом типичен для расстроенной моторики больных с мозжечковым заболеванием. Аналогия с поведением машины, наделенной недемпфированной обратной связью, столь очевидна, что мы решаемся видеть главную функцию мозжечка в регулировании нервных механизмов обратной связи, участвующих в целенаправленной двигательной активности.
Целенаправленное поведение с обратной связью можно опять подразделить. Оно может быть экстраполирующим (предсказывающим) или неэкстраполирующим (непредсказывающим). Реакции одноклеточных организмов, так называемые тропизмы, дают примеры непредсказывающего поведения. Амеба просто следует за источником, на который она реагирует; нет никаких данных о том, что она экстраполирует его траекторию. С другой стороны, предсказывающее поведение животных – самая обыкновенная вещь. Кошка, начинающая преследование бегущей мыши, не бежит прямо к месту, где мышь в данный момент находится, а движется к экстраполированному будущему положению. Не составит также труда найти примеры предсказывающих и непредсказывающих сервомеханизмов.
Предсказывающее поведение можно подразделить на различные порядки. Кошка, охотящаяся за мышью, – пример предсказания первого порядка; она предсказывает только мышиный путь. Бросание камня в движущуюся мишень требует предсказания второго порядка; здесь необходимо предвидеть пути мишени и камня. Примером предсказания более высокого порядка является стрельба из рогатки или лука.
Предсказывающее поведение требует различения по меньшей мере двух координат: оси времени хотя бы одной пространственной оси. Предсказание, однако, будет эффективнее и гибче, если действующий объект способен реагировать па изменения более чем в одной пространственной координате. Чувствительные рецепторы организма или соответствующие им элементы машины могут поэтому ограничивать предсказывающее поведение. Так, собака-ищейка следует следу; предсказывающее поведение ей не доступно, потому что химический, обонятельный вход приносит только пространственную информацию – расстояние, указываемое силой запаха. Внешние изменения, способные возбуждать слуховые или, еще лучше, зрительные рецепторы, допускают более точную пространственную локализацию; отсюда возможность более эффективных предсказывающих реакций при действии входа на эти рецепторы.
Способность к предсказывающим действиям встречает, помимо того, ограничения во внутренней организации действующего объекта. Так, машина, предназначенная для предсказывающего слежения за подвижной светящейся целью, должна не только быть чувствительна к свету (например, через приданный ей фотоэлемент), но и обладать структурой, пригодной для расшифровки светового входа. Представляется вероятным, что ограничения внутренней организации, особенно организации центральной нервной системы, определяют сложность предсказывающего поведения, которой может достичь млекопитающее. Так, можно подумать, что нервная система крысы или собаки не позволяет им осуществлять интеграцию входа и выхода, необходимую дли предсказывающей реакции третьего или четвертого порядка. Действительно, одна из особенностей скачка, наблюдаемого при сравнении человека с другими высшими млекопитающими, заключается, по-видимому, в том, что последние способны лишь к предсказывающему поведению низшего порядка, тогда как человек потенциально способен к весьма высоким порядкам предсказания.
Ниже приводится таблица предлагаемой классификации поведения:
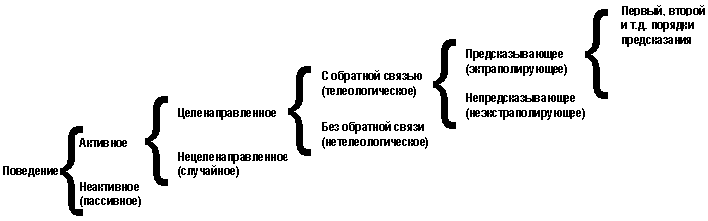
Нетрудно видеть, что каждая из дихотомий произвольно выделяет одну черту, признаваемую интересной, оставляя аморфный остаток – не-класс. Очевидно также, что критерии отдельных дихотомий разнородны. Понятно поэтому, что существует много других линий классификации, независимых от рассмотренных. Так, можно разделить поведение в целом или внутри каждой из табличных групп па линейное (выход пропорционален входу) и нелинейное. Для многих целей было бы полезно деление на непрерывное и дискретное поведение. Различные степени свободы, свойственные поведению, также могут служить основанием систематизации.
Классификация, представленная в предыдущей таблице, была выбрана по нескольким причинам. Она приводит к выделению класса предсказывающего поведения – особо интересного класса, ввиду открывающейся возможности систематизировать все более сложные критерии поведения организмов. Она делает упор на понятиях целенаправленности и телеологии, понятиях, как мы видели, большого значения, хотя и дискредитированных сегодня. Наконец, она показывает, что единообразный бихевиористический анализ применим как к машинам, так и к живым организмам, независимо от сложности поведения.
Иногда утверждалось, что конструкторы машин просто пытаются воспроизводить действия живых организмов. Это некритическое мнение. В том, что поведение некоторых машин являет грубое сходство с реакциями организмов, нет ничего необычайного. Поведение животных включает много разновидностей всех возможных способов поведения, а изобретенные до сих пор машины еще очень далеки от исчерпания всех этих возможностей. Отсюда значительное перекрытие двух названных областей поведения. Нетрудно, однако, найти примеры созданных человеком машин, поведение которых превосходит человеческое поведение. Взять хотя бы машины с электрическим выходом; ведь люди, в отличие от электрических рыб, неспособны к испусканию электричества. Еще лучше, пожалуй, пример радио: не известно ни одного животного, которое обладало бы способностью к генерации коротких волн, даже если принимать всерьез так называемые опыты по телепатии.
Дальнейшее сравнение животных организмов и машин приводит к следующим выводам. В настоящее время методы изучения обеих групп подобны. Будут ли они столь же близки всегда, зависит, по всей видимости, от существования или несуществования качественно особых, уникальных характеристик, свойственных одной группе и отсутствующих у другой. Покамест таких качественных различий не обнаружено.
Общие классы поведения одинаковы для машин и для живых организмов. Специфические, узкие классы могут принадлежать исключительно одной или другой группе. Так, никакая из существующих машин не могла бы написать санскрито-мандаринский словарь4. С другой стороны, мы не знаем ни одного живого организма, который бы катился на колесах; представим себе, каковы бы были последствия, если бы инженеры настаивали на копировании живых организмов и вместо колес снабжали бы свои локомотивы руками и ногами!
В то время как бихевиористический анализ машин и живых организмов в основном единообразен, функциональное исследование их обнаруживает глубокие различия. Структурно организмы по преимуществу коллоидальны и содержат главным образом белковые молекулы – большие, сложные и анизотропные; машины чаще всего металлические и содержат главным образом малые молекулы. С энергетической точки зрения машины обыкновенно отличаются высокими разностями потенциалов, обеспечивающими быструю мобилизацию энергии; в организмах энергия распределена равномернее и не очень мобильна. Так, в электрических машинах проводимость большей частью электронная, тогда как в организмах электрические изменения обыкновенно ионные.
В машинах широта и гибкость достигаются в основном умножением эффектов во времени; легко получаются и используются частоты в миллион герц и выше. В организмах правилом является не временное, а пространственное умножение; временные достижения бедны – самые быстрые нервные волокна могут проводить только около тысячи импульсов в секунду; пространственное же умножение обильно и изумительно в своей компактности. Это различие хорошо иллюстрируется сравнением телевизора и глаза. Телевизор можно рассматривать как одноколбочковую сетчатку; образы формируются разверткой, т.е. регулярным последовательным детектированием сигнала со скоростью около 20 миллионов в секунду. Развертка – это процесс, который редко, если когда-либо вообще, встречается в организмах, требуя высоких частот для эффективного осуществления5. Глаз же использует пространственный умножитель. Вместо единственной колбочки телевизора мы находим в человеческом глазу около шести с половиной миллионов колбочек и около ста пятнадцати миллионов палочек.
Если бы инженеру пришлось конструировать робота, грубо подобного по своему поведению некоторому живому организму, то сегодня он не стал бы обращаться для этого к белкам и иным коллоидам. Он, вероятно, построил бы его из металлических частей, диэлектриков и многочисленных электронных ламп. Движения робота могли бы быть гораздо быстрее и сильнее соответствующих движений первоначального организма. Зато обучение и память оставались бы весьма рудиментарными. В будущие годы, когда знание коллоидов и белков возрастет, будущие инженеры смогут взяться за конструирование роботов, подобных тому или иному млекопитающему не только по поведению, но и по структуре. Окончательной моделью кошки может быть только другая кошка, рождена ли она еще от одной кошки или же синтезирована в лаборатории.
В нашей классификации поведения термин «телеология» употреблялся как синоним «целенаправленности, управляемой обратной связью». В прошлом телеологию толковали как нечто предполагающее цель и часто добавляли сюда смутное понятие «конечной причины». Это понятие конечных причин вызвало противопоставление телеологии и детерминизма. Обсуждение причинности, детерминизма и конечных причин не входит в нашу задачу. Можно отметить, однако, что целенаправленность, как она здесь была определена, совершенно не зависит от причинности, начальной или конечной. Телеология была дискредитирована главным образом потому, что при прежнем ее определении причина должна следовать во времени за действием. Однако с крушением этого аспекта телеологии было, к сожалению, отказано в признании и всякой целенаправленности. Мы видим в целенаправленности понятие, необходимое для познания некоторых определенных способов поведения, и считаем, что телеологический подход полезен, если только не касаться проблем причинности и довольствоваться исследованием целенаправленности как таковой. Мы ограничили содержание телеологического поведения, прилагая последнее наименование лишь к таким целенаправленным реакциям, которые управляются ошибкой реакции, т.е. разностью между состоянием действующего объекта в данный момент и конечный состоянием, принимаемым за цель. Тем самым телеологическое поведение становится равнозначным поведению, управляемому отрицательной обратной связью, и, теряя соответственно в широте, выигрывает как понятие в точности.
Согласно этому узкому определению, телеология противоположна не детерминизму, а не-телеологии. Как телеологические, так и нетелеологические системы будут детерминистическими, коль скоро рассматриваемое поведение относится к области, где детерминизм вступает в силу. Понятие телеологии имеет с понятием причинности лишь один общий элемент – ось времени. Но причинность означает одностороннюю, относительно необратимую функциональную зависимость, тогда как телеология связана с поведением – не с функциональными зависимостями.
Гарвардская медицинская школа и Массачусетсский технологический институт
Сноски:
- Rosenbluelh А., Wiener N., Bigelow J. Behavior, Purpose and Teleology. // Philosophy of Science. – Baltimore, 1943. – Vol. 10. – № 1. – Р. 18–24.
- От англ. behavior – «поведение». Напрашивается сопоставление с бихевиоризмом в психологии (Дж. Б. Уотсон н др.), однако по существу речь идет о самостоятельном, отдельном направлении. Насколько можно судить, авторы не применяют специфических положений школы Уотсона и не отрицают, подобно ему, психики и сознания. Впрочем, в современной зарубежной литературе термин «бихевиоризм» употребляется и просто как название науки о поведении. — Прим. ред.
- Операциональное определение понятия – определение, допускающее точную проверку через эксперименты или измерение. – Прим. ред.
- «Мандаринский язык» – старое название северного (пекинского) диалекта китайского языка. – Прим. ред.
- Позже, в связи с исследованием альфа–ритма, Винер пришел к мысли о наличии в зрительном механизме мозга групповой развертки («Кибернетика», гл. 7). – Прим. ред.
| ↑ | Оглавление | ||
| ← | Глава 10: «Мозговые волны и самоорганизующиеся системы» | Приложение 2: Винер Н. «Машина умнее своего создателя» | → |